
新入社員
よ〜し。
前回と同じ流れならなんとかなりそうだ!
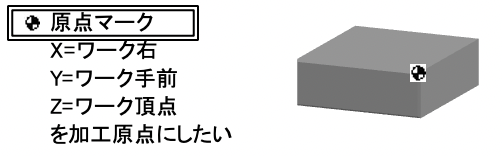

このような場合のY座標を取得してみます。
(あらかじめワークは取り付けておく)
タッチセンサー呼び出し
新入社員
呼び出し方は前回と一緒だから…
「ポジション画面」
メニューキー[◁]押下
“プログラム”押下
[MDI]押下

“ツールチェンジ”押下
タッチセンサーツール番号を入力(例:30)
[Input]押下
[Start]押下

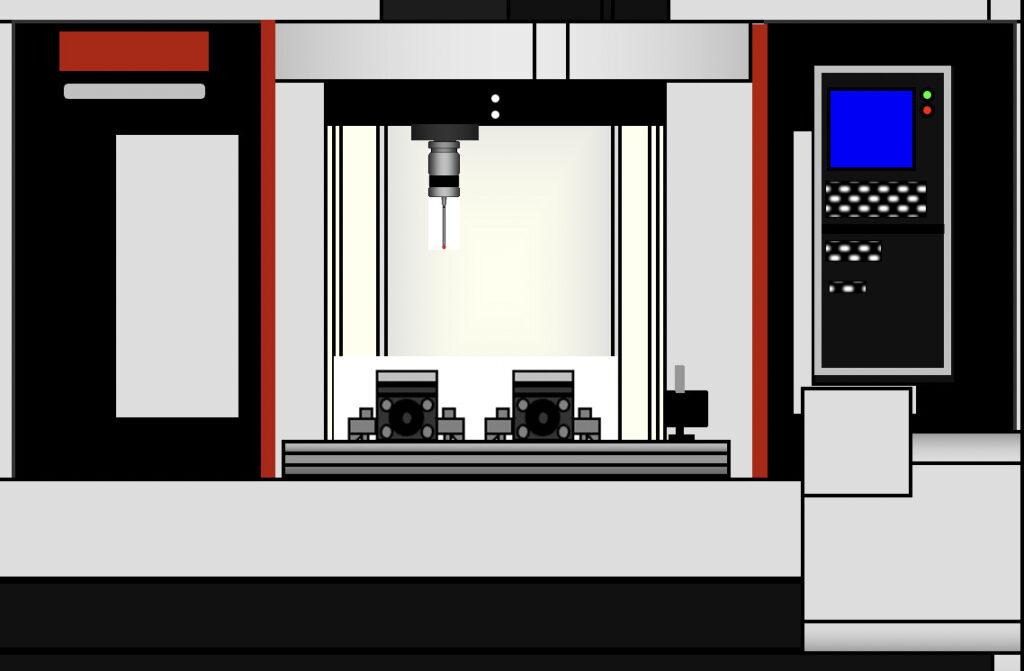
新入社員
よし!
機械の主軸にタッチセンサーが出てきた!
加工前計測
SugarBox
次のプログラムの
“基本座標 Y 0.”を加工品の値に設定するよ。

[手動]押下 (×1000,×100,×10,×1から任意選択 数値が大きければ移動量が大きい)

軸指定ダイヤルと

ハンドルを利用してタッチセンサーをワーク付近に持っていく

※注意事項
接近の確認のためドアを開けてタッチセンサーを移動させることがほとんどですが、
初心者は機械やワークにタッチセンサーや主軸を接触させないこと
さらに、操縦者本人の安全を確実に確保してください。
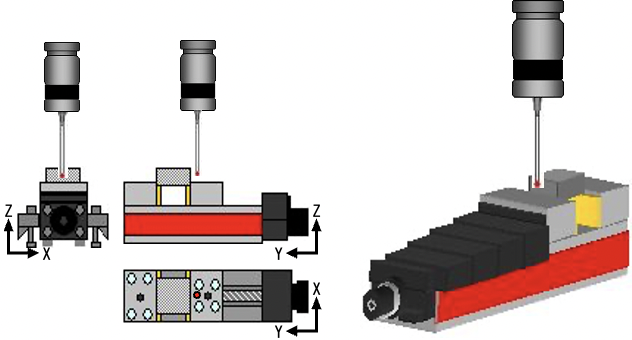
~ 基準面 Y の場合 ~
次のように基準にしたい面の5~10mm程度手前にタッチセンサーを移動させます。
[MDI]押下
“プログラム”押下
“FRM検索”押下
[Input]押下 (この時点でプログラム画面のFRM部分にカーソルが移動)
“センサー +Y”押下
[0]押下
[Input]押下
[Start]押下 (ドアを開けている場合は、ドアを閉め、ドアロックキーをロック側にしてから)
***プログラム***

“基本座標 Y 0.” が実際の取得Yの値に変更され、
Y座標の取得が完了しました。
新入社員
XとY座標の取得ができた!
SugarBox
いいね〜♪
後はZ座標を取得すれば最低限の座標が揃うね!
次、行ってみよう!
他の座標取得用リンク


コメント